Design and Construction of Resistance Exercise Equipment
The Science behind Exercise Equipment
By Gideon Ariel in The Canadian Society of Biomechanics on Sunday, December 1, 1974
Biomechanical Consideration in the Design and Construction of Resistance Exercise Equipment
This article by Gideon B. Ariel, Ph.D., discusses the importance of biomechanical considerations in the design and construction of resistance exercise equipment. The author emphasizes the need for scientific methods of research to accurately assess human biomechanical changes and the importance of understanding the complexities of human motion.
The article highlights the role of computerized biomechanical analysis in assessing the intricate relationships among the body's link system. It also discusses the importance of considering the parameters of mass and the moment of inertia in human dynamics.
The author further explains the impact of inertial forces on the weight of the equipment and the magnitude of muscle contraction. The article suggests that these forces must be incorporated in the design of exercise equipment to maintain maximum muscular efforts.
The article also discusses the importance of understanding the relative effects of inertia to prevent machine design failures and operational failures. It emphasizes the need for proper mechanical balances in the lifting ratios and in the relative distribution of all moving parts for optimum equipment design.
The article concludes by discussing the need for accurate variable resistance in exercise equipment to maintain the same degree of muscular involvement throughout the entire range of movement.
Article Synopsis
This article discusses the role of force in athletic performance and its implications for exercise equipment design. It argues that while force has traditionally been seen as the most important component of athletic performance, it is only one of three factors underlying all human movement, the others being displacement (direction of movement) and duration of movement. The article suggests that these parameters are equally important in human performance and that the brain's control over these forces is crucial for skilled athletic performance.
The article also highlights recent neurological research showing that the brain reacts differently depending on whether the motion is slow or fast, with control signals more closely related to rates of change than force levels. This has implications for the design of exercise equipment, with the article arguing that training an isolated muscle group slowly may result in poorer athletic performance.
The article concludes by calling for more research into exercise machine design that takes into account the sequencing and coordination of agonists and antagonists, and for this research to be presented to consumers before they purchase equipment.
Tip: use the left and right arrow keys
The Canadian Society Societe Canadienne Proceedings of the
for Biomechanics de Biomecanique
1st Annual Meeting
University of Alberta Edmonton, Alberta 1974
a
I
=I1swi
s'1Ii/
BIOMECHANICAL CONSIDERATION IN THE DESIGN AND CONSTRUCTION OF RESISTANCE EXERCISE EQUIPMENT
Ariel., Gideon B., Ph. D.
Computerized Biomechanical Analysis Incorporated, 316 College Street,
Amherst,
Massachusetts, U.S.A.
INTRODUCTION
In order to accurately assess man's biomechanical system, it is necessary to resort to scientific methods of research which are capable of accurately determining the various human mechanical changes. This requires a systematic application of the laws of mechanics and biological concepts, both anatomical, physiological and biomechanical, to the problems of human motion.
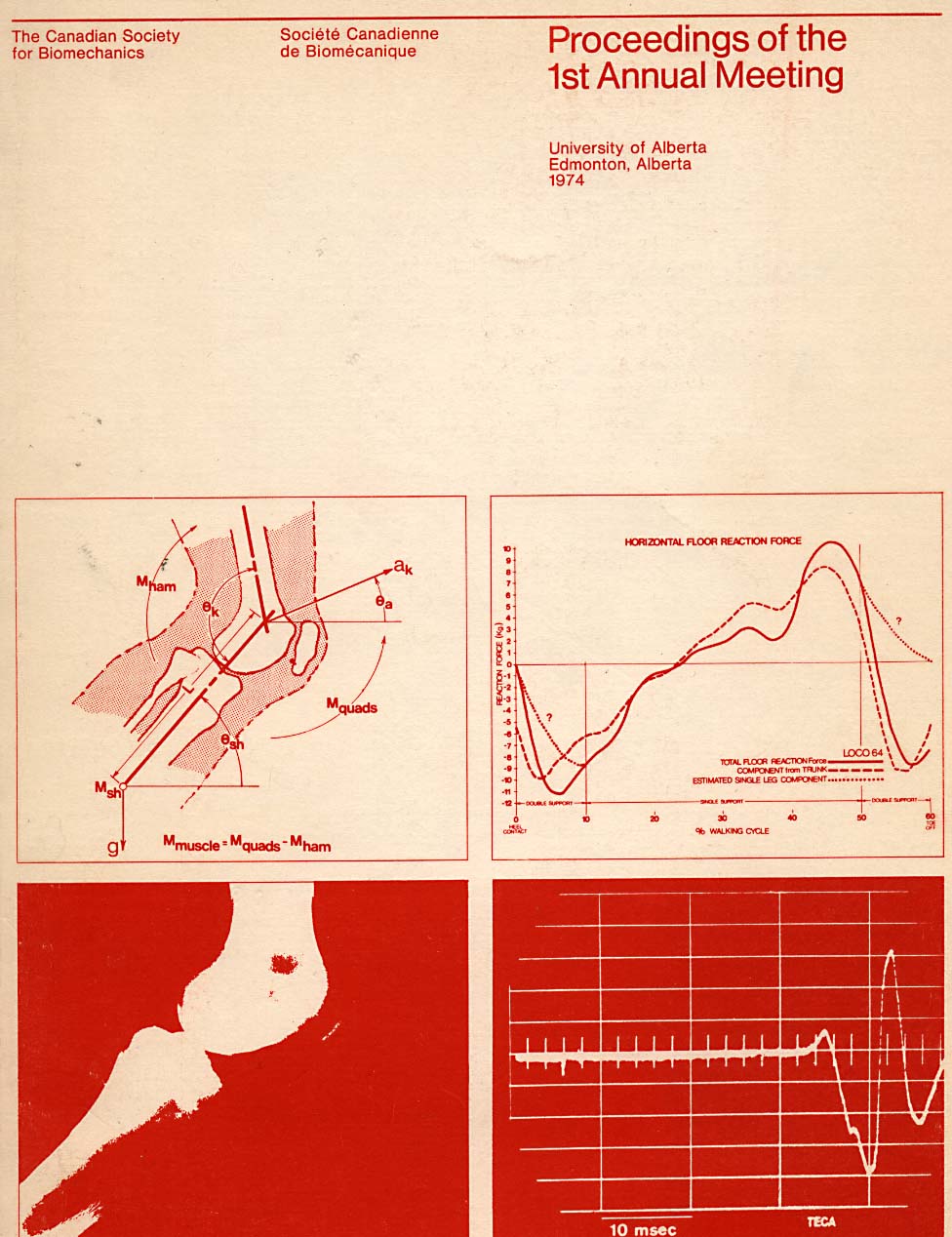
In order to understand some of these complexities, consider the following illustration. A man performs a squat exercise using the same weight but assuming two different trunk positions. The traditional kinesiological approach utilizing conventional methods of determination of origins and insertions of various muscles may conclude that the knee extensors are the dominant muscles. However, by utilizing competerized biomechanical analysis to assess the intricate relationships among the body's link system, it was determined that with an erect trunk the knee extensors are the dominant muscular force, but when leaning forward the knee flexors are dominant.
While assessing man's biomechanical system, it is equally important to simultaneously consider the parameters of mass and the moment of inertia. Human dynamics are concerned with man in motion and include any external implements with which he interacts. Both the object and any body part may resist changes of motion and these changes in motion are directly related to both the mass of the segment and its moment of inertia. For example, when lifting a 100 lb barbell, it is generally assumed that the resistance applied to the body is 100 lbs. and that this barbell imparts a 100 lb. resistance throughout the complete range of motion. However, when the 100 lb. barbell is moving, the resistance it provides can vary from more than 100 lbs. to less than 100 lbs., depending upon the acceleration of the motion.
Since these inertial forces (acceleration and deceleration) affect the weight of the 100 lb. barbell, the magnitude with which the muscle has to contract is also affected.
In order to effectively cope with the problems of inertia associated
with resistive exercise equipment, it is essential to accurately identify their particular motion patterns. Since acceleration and deceleration
1)r
are factors in all human movement and can be modified through mechanical means, they therefore, must be incorporated in the design of the exercise equipment. In order to maintain maximum muscular efforts, it is necessary that the resistance be varied throughout the range of motion according to the motion parameters and the biomechanical changes in the body's link system.
When designing exercise machines for the development of muscular strength and efficiency, there are two alternatives from which to choose if pertinent information is not available regarding some human performance charteristics. In the first place one can pick answers out of thin air; this obviously is a pretty risky business, although it is, unfortunately, a fairly common practice. Alternatively, it may be possible to carry out some research project to develop the needed information; such a project can, of course, range from those of superficial nature to those of a broad-scale, even basic-research, nature. Visual inspection can in no way ascertain the numerous forces or their direction acting on the individual. Consider the confidence which an engineer would inspire were he to look at both sides of the river and visually determine the details of the bridge to be constructed.
Another goal in designing exercise machines is to optimize the resultant resistance force at the proper direction. When the force is determined only perceptually it is very likely that the design will lack maximal efficiency since guessing is involved. Presently, many exercise machines in various companies are designed merely from personal observations and ideas. There still exists the absence of scientific data relating to each individual athlete and his specific performance. It is almost impossible to design an appropriate exercise machine from just an idea or observation. Whether or not, an athlete is using his body efficiently on the correct equipment cannot be determined by visual observation alone.
METHOD
In weight training, the ultimate objective is for the muscle to function at maximum force throughout the range of movement.
To accomplish this objective, it is necessary to assess man's biomechanical changes and then develop a resistance intensity that will accommodate those changes. The variations in resistance intensity must be precisely incorporated into a variable resistance lifting mechanism. It is likewise essential that the overall machine design and operation do not adversely affect the performance of this mechanism.
To prevent machine design failures and operational failures, it is necessary to understand the relative effects of inertia. Inertial forces affect the motion and the magnitude of the muscle's involvement. The smaller the inertial force produced by the machine's moving parts, the greater the muscular involvement. In order to maintain small inertial forces, it is important to retain proper mechanical balances in the lifting ratios and in the relative distribution of all moving parts. These two factors cannot be ignored in optimum equipment design.
26
The laws of physics apply to any system in motion regardless of whether the system is a human or machine. The human body may be likened to a machine made up of mechanical members: the joints serve as fulcrums and the contracting skeletal muscles exert forces on the segments. The segments of the human body form a link system consisting of segments such as the foot, shank, thigh, trunk, shoulders, upper-arm, forearm, and hand.
The kinetic analysis involves the following steps: 1. Obtaining cinematographic data. 2. Digitizing the data.
Measuring and utilizing anatomical data.
Utilization of the computer program for kinetic
analysis and quantifying human performance. 5. Interpretation of the results.
Obtaining Cinematographic Data
Slow motion cinematography is used to record any desired motion. This technique permits an undetected recording of an individual performance under actual conditions. Most human motions in sport or in industry requires camera speeds between 64 and 200 frames per second with / open shutter to prevent fast-moving segments from becoming mere blurs. Additional information concerning the camera is available in the American Cinematographer Manual.
Digitizing the Data
The second step in assessing the data involves a composite tracing of the joint centers of the body. The film is projected on a screen by a Super Sports Analyst Projector (L-W Photo Inc., Model 800) which facilitates location of the joint center for each segment. The model GP-2 Graf-Pen Digitizer permits precise determination of the coordinates of
the joint centers. These X and Y coordinates are stored and then changed into numerical data by a computer program.
Anatomical Data
Calculation of forces and moments of force require knowledge of the mass of each segment as well as its center of gravity. These parameters are available in a publication by the Aerospace Medical Research Laboratory with additional anatomical data listed in a monograph by Krogman and Johnson. Tables of body segments percentages of total body weight, specific gravity, as well as, segments lengths as percentages of total height tables may be used when data is not available on the performer. However, there are various methods for calculation of the weight, volume, and the center of mass of segments of the human body when the subject is available. In order to calculate the forces it is necessary to know the Radii of Gyration which may be calculated from Dempster's data on moments of inertia.
To design the proper layout of exercise machines with the appropriate resistance lever arm in accordance with the requirements of kinesiology and the anatomy of man, designers need two kinds of data:
- The established linear parameters of man which indicate
postural relations (static measurements).
- The established movement capabilities of man during the
exercise itself (dynamic measurements).
27
Static measurements are relatively simple in comparison with dynamic measurements, which require specific, often unique, design features to enable optimized muscular effort. The dynamic data allowed development of apparatus which assign different resistances throughout the range of motion in order to accommodate the biomechanical changes occurring during exercise.
RESULTS
In order to scientifically evaluate exercise machines, it is necessary to define the standards which they should maintain. The following example considers the leg press machine.
It can be assumed that the leg press machine was originally developed in order to strengthen the leg extensors around the knee joint. In order to achieve this function, the ideal machine should provide for the following factors:
A resistance capable of maintaining maximum muscular range of motion.
A machine design capable of reducing the effects of shearing forces.
A machine capable of maintaining the natural acceleration pattern of the leg extensors as is required in athletic performances and other strenuous activities.
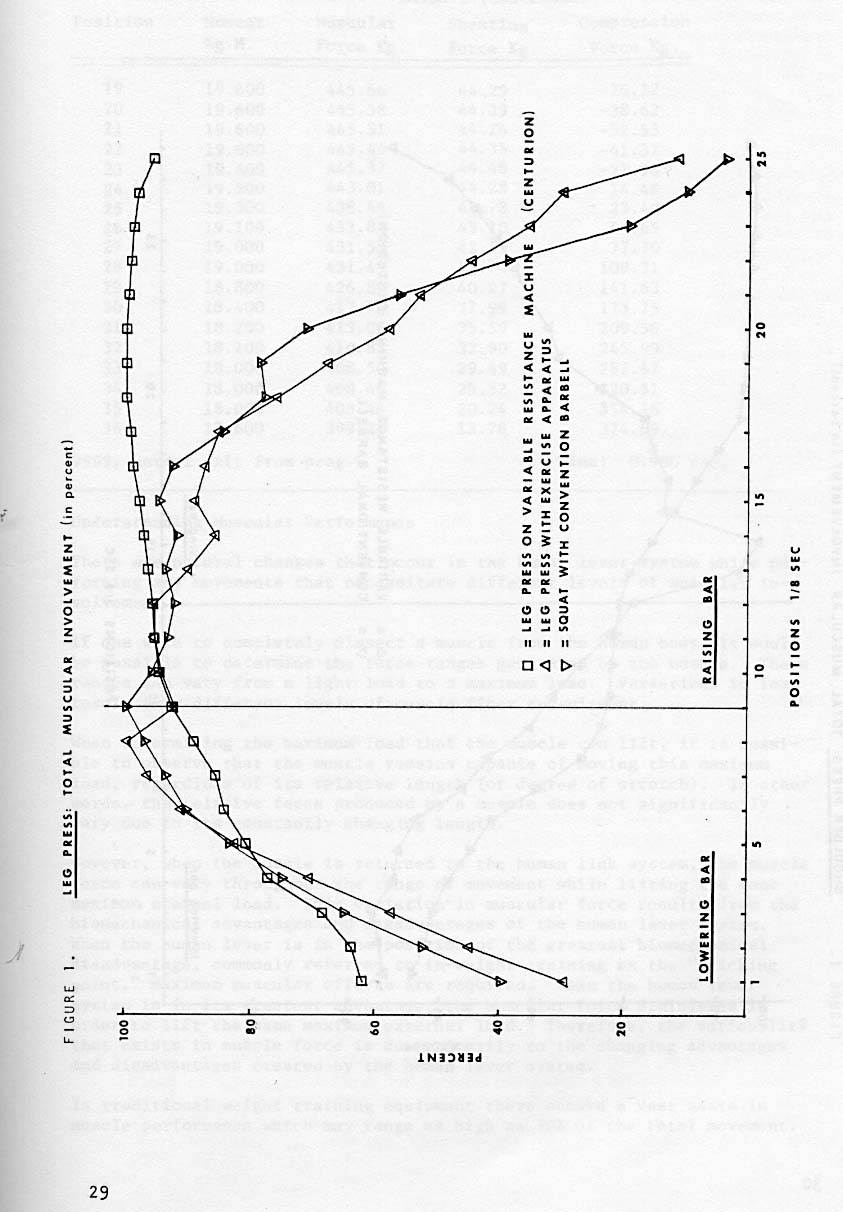
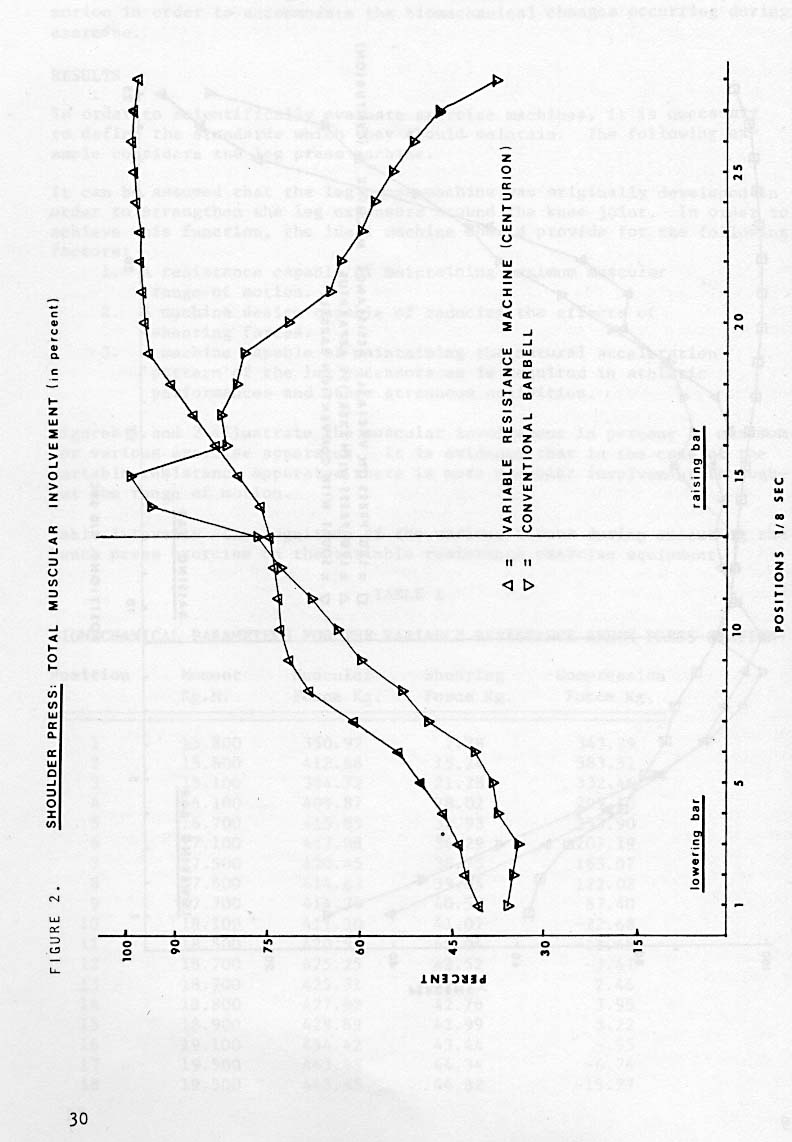
Figures 1 and 2 illustrate the muscular involvement in percent of maximum for various exercise apparatus. It is evidence that in the case of the variable resistance apparatus there is more muscular involvement throughout the range of motion.
Table 1 reveals the magnitude of the various forces during executing the bench press exercise on the variable resistance exercise equipment.
TABLE 1
BIOMECHANICAL PARAMETERS FOR THE VARIABLE RESISTANCE BENCH PRESS STATION
Position Moment Muscular Shearing Compression
Kg.M. Force Kg. Force Kg. Force Kg.
1 15.800 350.92 7.28 343.29
2 15.600 412.68 15.24 383.51
3 15.100 394.72 21.28 332.46
4 16.100 409.87 28.02 299.10
5 16.700 415.85 32.93 253.90
6 17.100 417.88 36.29 207.19
7 17.500 420.45 38.75 163.07
8 17.500 414.83 39.65 122.02
9 17.700 414.34 40.50 87.40
10 18.100 411.30 41.07 -22.68
11 18.500 420.59 42.04 -11.48
12 18.700 425.25 42.52 -3.47
13 18.700 425.31 42.53 2.46
14 18.800 427.62 42.76 3.95
15 18.900 429.89 42.99 3.22
16 19.100 434.42 43.44 -.55
17 19.500 443.48 44.34 -6.76
18 19.500 443.45 44.32 -15.27
28
FIGURE 1.
LEG PRESS: TOTAL MUSCULAR INVOLVEMENT (in percent)
100
Bo
60
40
Q = LEG PRESS ON VARIABLE RESISTANCE MACHI (CENTURION)
� = LEG PRESS WITH EXERCISE APPARATUS
� = SQUAT WITH CONVENTION BARBELL
20
1
S
10
1S
20
� 25
POSITIONS 111 SEC
FIGURE 2.
SHOULDER PRESS: TOTAL MUSCULAR INVOLVEMENT (in percent)
z
100 90
7S 60
W
~ 45
W d
30
15
VARIABLE RESISTANCE MACHINE (CENTURION) CONVENTIONAL BARBELL
raising bar
1
S
10
1S
20
25
POSITIONS 1/8 SEC
TABLE 1 (continued)
Position Moment Muscular Shearing Compression
Kg-M. Force Kg. Force Kg. Force Kg.
19 19.600 445.66 44.29 -26.22
20 19.600 445.58 44.39 -38.62
21 19.600 445.51 44.24 -52.53
22 19.600 445.44 44.35 -41.37
23 19.600 445.37 44.48 -21.98
24 19.500 443.01 44.28 14.48
25 19.300 438.44 43.78 23.49
26 19.100 433.84 43.10 49.65
27 19.000 431.53 42.45 77.70
28 19.000 431.49 41.74 109.31
29 18.800 426.89 40.27 141.63
30 18.400 417.74 37.99 173.75
31 18.200 413.05 35.59 209.56
32 18.100 410.83 32.90 245.99
33 18.000 408.50 29.49 282.67
34 18.000 408.49 25.32 320.51
35 18.000 408.46 20.24 354.76
36 17.600 399.23 13.78 374.69
9999, normal exit from prog. Time: 0.990 sec.
tnderstanding Muscular Performance
There are natural changes that occur in the human lever system while performing any movements that necessitate different levels of muscular involvement.
If one were to completely dissect a muscle from the human body, it would be possible to determine the force ranges generated by the muscle. These ranges can vary from a light load to a maximum load. Variations in load result from different levels of muscle fiber recruitment.
When determining the maximum load that the muscle can lift, it is possible to observe that the muscle remains capable of moving this maximum load, regardless of its relative length (or degree of stretch). In other words, the relative force produced by a muscle does not significantly vary due to its constantly changing length.
However, when the muscle is returned to the human link system, the muscle force can vary throughout the range of movement while lifting the same maximum eternal load. This variation in muscular force results from the biomechanical advantages and disadvantages of the human lever system. When the human lever is in the position of the greatest biomechanical disadvantage, commonly referred to in-weight training as the "sticking point," maximum muscular efforts are required. When the human lever system is in its greatest advantage, the muscular force diminishes in order to lift the same maximum external load. Therefore, the variability that exists in muscle force is due primarily to the changing advantages and disadvantages created by the human lever system.
In traditional weight training equipment there occurs a vast waste in muscle performance which may range as high as 70% of the total movement.
31
In order to develop maximum conditioning effectiveness, it is an absolute requirement to accurately vary the resistance. The variations in resistance must occur only when there are biomechanical advantages or disadvantages which decrease or increase the required muscular efforts. By varying the resistance accurately, it is possible to maintain the same degree of muscular involvement (efforts) throughout the entire range of movement.
In the following computerized biomechanical analysis, the force-massacceleration method of deriving the equations of motion of the body's segments was used to determine the values of the moments of force around the various body's segments at successive instances in the performance of the exercise. Subsequently, the fluctuations or muscular performance were analyzed in relation to the total movement.
Actual computer outputs on the Nautilus leg press machine have been included along with a brief interpretation of their findings.
The computer outputs provide the necessary data for the muscular force data. The muscular force values are the only significant means of evaluating muscular performances (conditioning benefits).
The following muscle force data for the Nautilus leg press machine reveals that the resistance provided fails to maintain maximum muscular efforts throughout the entire range of movement. Maximum muscular efforts required muscular efforts diminish rapidly to a point of less than 10% muscular involvement (or exertion).
On the other hand, the variable resistance equipment maintained a muscle performance level above 90% throughout the range of motion.
It is possible to assume that the failure to provide accurate variable resistance in the Nautilus leg press occurred as a result of their inability to accurately assess human movement and the other external motion parameters. Their lack of knowledge resulted in a machine incapable of accommodating the biomechanical changes necessary for maximum muscular performance. In addition, the mass of the machine's moving parts create inertial forces which further reduce the required efforts.
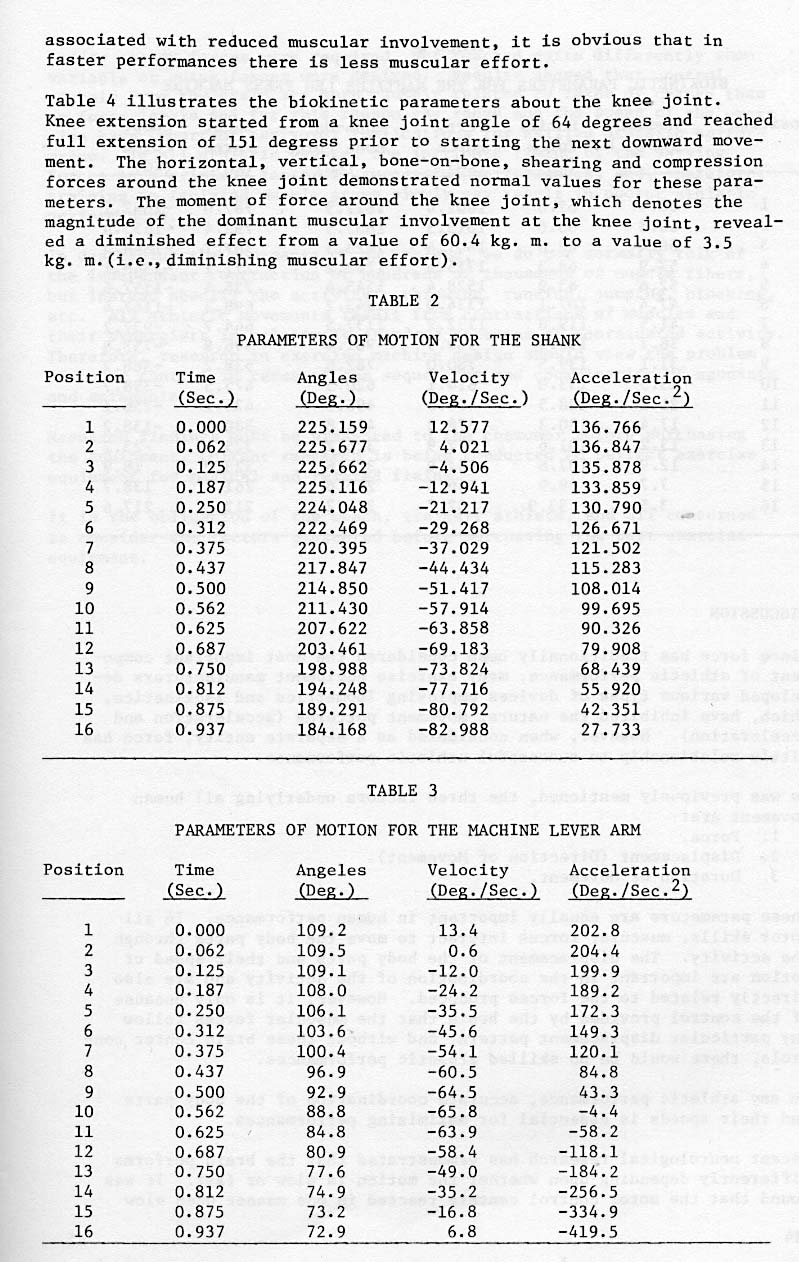
Table 2 illustrates the pattern of the shank segment (lower leg). This table reveals the position or the film frame; the angle of the segment relative to the right horizontal; the velocity of the segment in degrees/ sec.; and the acceleration in degrees/sec.2
The shank accelerates throughout the range of motion from 136.8 deg./sec.2 at the beginning of the stroke to 27 7 deg./sec.2 at the end of the stroke. The maximum velocity of the shank was reached at the end of the stroke at 83 deg./sec.
Table 3: Kinematic parameters for the machine lever arm. All moving body segments must slow down and finally stop by the end of a movement, but Nautilus' heavy moving parts cause such large inertial forces that the stopping process; both man and machine, begins too soon. Therefore, it is these large inertial forces rather than efforts which stop the movement. The machine's deceleration can be observed clearly in positions 10-16. In other analyses of this machine, it was observed that performances at faster speeds resulted in greater decelerations and these decelerations occurred sooner in the stroke. Because the decelerations are
32
associated with reduced muscular involvement, it is obvious that in faster performances there is less muscular effort.
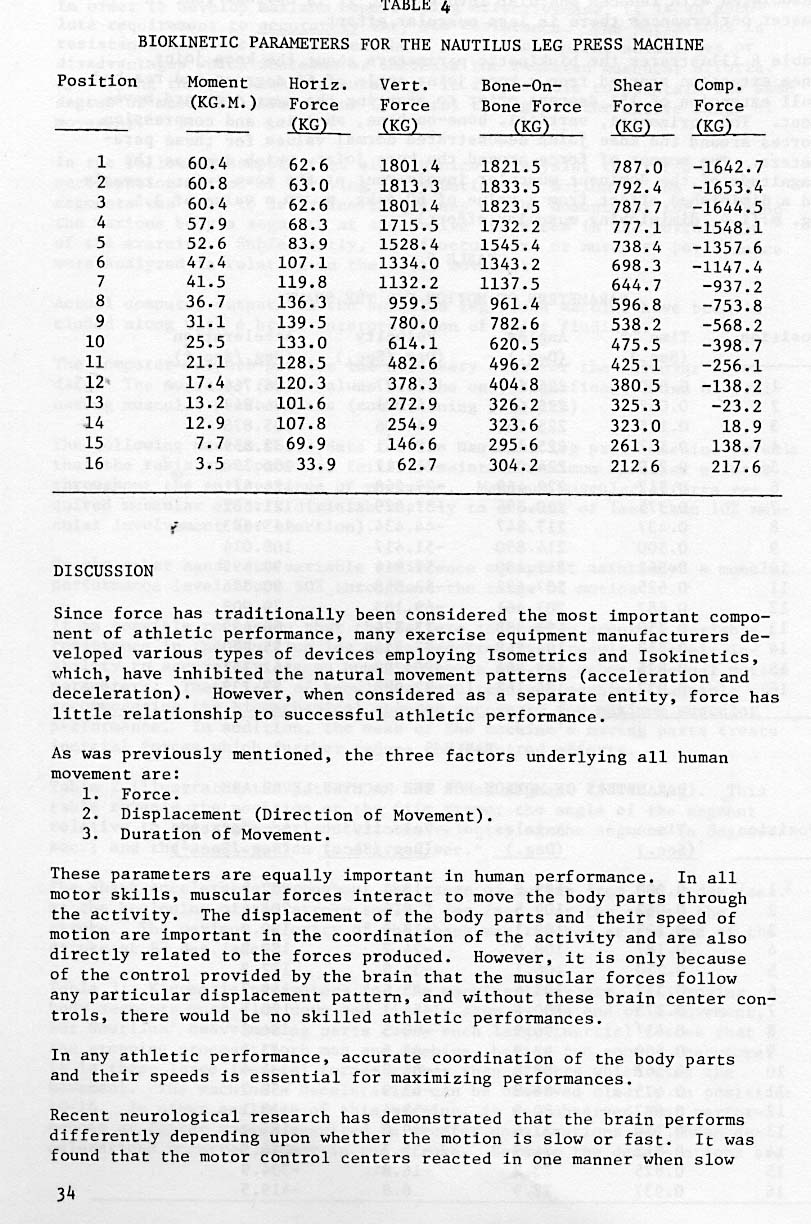
Table 4 illustrates the biokinetic parameters about the knee joint.
Knee extension started from a knee joint angle of 64 degrees and reached full extension of 151 degress prior to starting the next downward movement. The horizontal, vertical, bone-on-bone, shearing and compression forces around the knee joint demonstrated normal values for these parameters. The moment of force around the knee joint, which denotes the magnitude of the dominant muscular involvement at the knee joint, revealed a diminished effect from a value of 60.4 kg. m. to a value of 3.5 kg. m.(i.e.,diminishing muscular effort).
TABLE 2
PARAMETERS OF MOTION FOR THE SHANK
Position Time Angles Velocity Acceleration
(Sec. (Deg.) (Deg./Sec.) (Deg./Sec.2)
1 0.000 225.159 12.577 136.766
2 0.062 225.677 4.021 136.847
3 0.125 225.662 -4.506 135.878
4 0.187 225.116 -12.941 133.859
5 0.250 224.048 -21.217 130.790
6 0.312 222.469 -29.268 126.671
7 0.375 220.395 -37.029 121.502
8 0.437 217.847 -44.434 115.283
9 0.500 214.850 -51.417 108.014
10 0.562 211.430 -57.914 99.695
11 0.625 207.622 -63.858 90.326
12 0.687 203.461 -69.183 79.908
13 0.750 198.988 -73.824 68.439
14 0.812 194.248 -77.716 55.920
15 0.875 189.291 -80.792 42.351
16 0.937 184.168 -82.988 27.733
TABLE 3
PARAMETERS OF MOTION FOR THE MACHINE LEVER ARM
Position Time Angeles Velocity Acceleration
-Secj (Deg.) (Deg./Sec.) (Deg. /Sec .2)
1 0.000 109.2 13.4 202.8
2 0.062 109.5 0.6 204.4
3 0.125 109.1 -12.0 199.9
4 0.187 108.0 -24.2 189.2
5 0.250 106.1 -35.5 172.3
6 0.312 103.6 -45.6 149.3
7 0.375 100.4 -54.1 120.1
8 0.437 96.9 -60.5 84.8
9 0.500 92.9 -64.5 43.3
10 0.562 88.8 -65.8 -4.4
11 0.625 84.8 -63.9 -58.2
12 0.687 80.9 -58.4 -118.1
13 0.750 77.6 -49.0 -184.2
14 0.812 74.9 -35.2 -256.5
15 0.875 73.2 -16.8 -334.9
16 0.937 72.9 6.8 -419.5
'i'ABLh 4
BIOKINETIC PARAMETERS FOR THE NAUTILUS LEG PRESS MACHINE
Position Moment Horiz. Vert. Bone-On- Shear Comp.
(KG.M.) Force Force Bone Force Force Force
(KG) (KG) (KG) (KG) (KG)
1 60.4 62.6 1801.4 1821.5 787.0 -1642.7
2 60.8 63.0 1813.3 1833.5 792.4 -1653.4
3 60.4 62.6 1801.4 1823.5 787.7 -1644.5
4 57.9 68.3 1715.5 1732.2 777.1 -1548.1
5 52.6 83.9 1528.4 1545.4 738.4 -1357.6
6 47.4 107.1 1334.0 1343.2 698.3 -1147.4
7 41.5 119.8 1132.2 1137.5 644.7 -937.2
8 36.7 136.3 959.5 961.4 596.8 -753.8
9 31.1 139.5 780.0 782.6 538.2 -568.2
10 25.5 133.0 614.1 620.5 475.5 -398.7
11 21.1 128.5 482.6 496.2 425.1 -256.1
12 17.4 120.3 378.3 404.8 380.5 -138.2
13 13.2 101.6 272.9 326.2 325.3 -23.2
14 12.9 107.8 254.9 323.6 323.0 18.9
15 7.7 69.9 146.6 295.6 261.3 138.7
16 3.5 33.9 62.7 304.2 212.6 217.6
Y
DISCUSSION
Since force has traditionally been considered the most important component of athletic performance, many exercise equipment manufacturers developed various types of devices employing Isometrics and Isokinetics, which, have inhibited the natural movement patterns (acceleration and deceleration). However, when considered as a separate entity, force has little relationship to successful athletic performance.
As was previously mentioned, the three factors underlying all human
movement are:
Force.
Displacement (Direction of Movement).
Duration of Movement.
These parameters are equally important in human performance. In all motor skills, muscular forces interact to move the body parts through the activity. The displacement of the body parts and their speed of motion are important in the coordination of the activity and are also directly related to the forces produced. However, it is only because of the control provided by the brain that the musuclar forces follow
any particular displacement pattern, and without these brain center controls, there would be no skilled athletic performances.
In any athletic performance, accurate coordination of the body parts and their speeds is essential for maximizing performances.
Recent neurological research has demonstrated that the brain performs differently depending upon whether the motion is slow or fast. It was found that the motor control centers reacted in one manner when slow
34
and/or steady forces were required, but reacted quite differently when variable or quick forces were desired. Results showed that control signals from the brain are more closely related to rates of change than on force levels and for this reason the range and the speed of the exercise have important carryover implications for skilled athletic performance. In all athletic events, the intricate timing of the varying forces is a critical factor in successful performances, and, therefore, training an isolated muscle group slowly may result in poorer athletic performances.
In describing the movements of an athlete, we do not normally talk of
the independent contraction of hundreds of thousands of muscle fibers, but instead specify the activity: throwing, running, jumping, blocking, etc. All athletic movements result from contractions of muscles and their synergists in relatively standard patterns of coordinated activity. Therefore, research in exercise machine design should view the problem of motor control in terms of the sequencing and coordination of agonists and antagonists.
Research findings must be presented to the consumer before purchasing the equipment. Current research is being conducted to perfect exercise equipment for medical and related fields.
It is the obligation of the coach, trainer, athlete, and all concerned to consider the factors presented before purchasing the best exercise equipment.
35