A Kinetic Analysis of the Trot in Cats
The biomechanics of locomotion in cats was investigated
By Gideon Ariel in Neural Control of Locomotion on Thursday, October 2, 1975
Kinetic Analysis of the Trot in Cats
In this study, Gideon Ariel and Ruth Maulucci from the University of Massachusetts, Amherst, build upon Manter's 1938 research on the biomechanics of cat locomotion. They analyze the forces exerted by cats during a trot, using a Kistler force plate to record vertical, horizontal, and lateral force components. These components were then converted into analog electrical signals and displayed on a storage oscilloscope. Cinematographic data was also collected to identify which limbs were contributing to the forces.
The trot sequence was broken down into five stages, each involving different combinations of limbs touching the force plate. The data showed that the peak vertical force and absolute impulse during the stance phase of the forelimb were significantly greater than those of the hindlimb. The peak vertical force increased with the cat's speed, but the absolute impulse remained relatively constant across different trot speeds.
The horizontal force showed different characteristics in the forelimb and hindlimb. In the forelimb, the impact phase dominated, while in the hindlimb, the propelling phase was more significant. The lateral force was primarily applied away from the cat's body. The researchers believe these kinetic parameters can provide valuable insights into the neural mechanisms of locomotion.

Tip: use the left and right arrow keys
A KINETIC ANALYSIS OF THE TROT IN CATS
Gideon Ariel and Ruth Maulucci
Computer and Information Science, University of Massachusetts, Amherst, Massachusetts
The biomechanics of locomotion in cats was investigated in 1938 by Manter. The present study was designed to supplement Manter's results, thereby obtaining further kinetic information useful in the construction of models of locomotion.
METHODS
The forces exerted by the intact cat during the trot were analyzed. The experiment consisted of two distinct recording sessions using the same five cats for each session. The data were gathered by employing a Kistler force plate. As the cat progressed across the force plate, the instantaneous vertical, horizontal, and lateral components of the force exerted by the cat were obtained. These force components were converted into analog electrical signals and displayed on a storage oscilloscope. Cinematographic data were obtained simultaneously in order to provide information as to which limbs were contributing to the forces. Data reduction was accomplished by digitizing the force components. The digitizer results were analyzed using a CRT display terminal interfaced with a CDC-Cyber-74 computer.
A typical trot sequence across the force plate consisted of the following stages:
(1) A single forelimb touched the plate.
(2) The forelimb was removed and the ipsilateral hindlimb was placed on the plate.
759
(3) The hindlimb was joined on the plate by the contralateral forelimb.
(4) This pair of diagonal limbs was removed and the remaining hindlimb was placed on the plate.
(5) The hindlimb was removed and the sequence was RESULTS
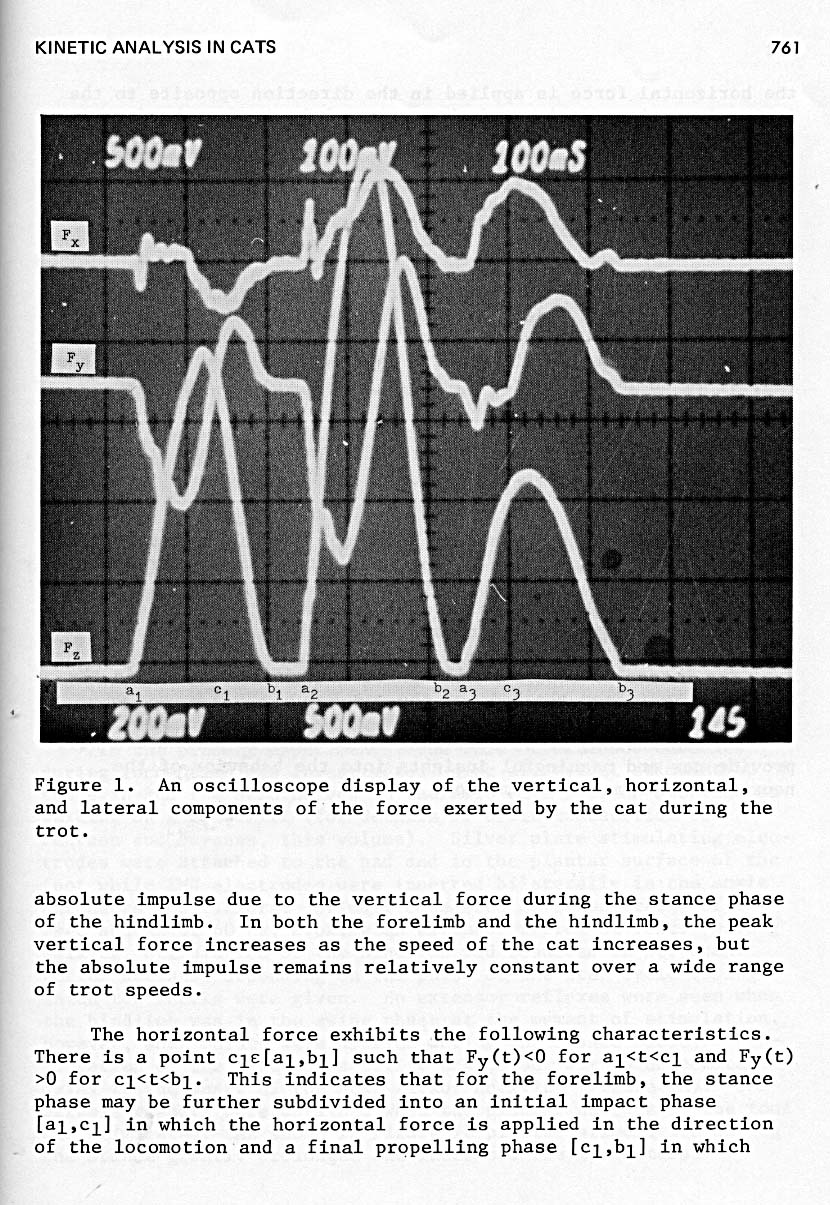
Figure 1 is a typical graph of this trot sequence as displayed on the oscilloscope. The sweep is 100 msec/division. The bottom graph, Fz, is the vertical force (recorded at 10 newtons/division). Positive values for Fz indicate that the force is applied downward. The middle graph, Fy, is the horizontal force (recorded at 4 newtons/division). Positive values for Fy indicate that the force is applied in the direction opposite to that of the locomotion and negative values for Fy indicate that the force is applied in the direction of the locomotion. The top graph, Fx, is the lateral force (recorded at 2 newtons/division). Positive values for Fx indicate that the force is applied to the cat's right. The graphs are divided into three distinct intervals of activity. In the interval [al,bl], the graphs correspond to the action of the left forelimb on the plate; thus, [al,bl] is the stance phase of the left forelimb. This is followed by a brief return to the base lines as this forelimb is removed. In the interval [a2,b2], the graphs correspond to the combined action of the left hindlimb followed by the right forelimb on the plate. It is noteworthy that the vertical force is remarkably smooth as the forelimb is added to the hindlimb on the plate. Next is another brief return to the base lines as these diagonal limbs are removed. Finally,
in the interval [a3,b3], the graphs correspond to the action of the right hindlimb on the plate; thus, [a3,b3] is the stance phase of the right hindlimb.
With respect to the vertical force, the following may be noted.
Max({ IFz(t) I lal<>max({ IFz(t) I la3it<>
i.e., the peak vertical force in the stance phase of the forelimb is significantly greater than the peak vertical force in the stance phase of the hindlimb. Also,
I:blFz(t)dtl>lfb3Fz(t)dtl, al a
i.e., the absolute impulse due to the vertical force during the stance phase of the forelimb is significantly greater than the
concluded.
i
KINETIC ANALYSIS IN CATS
761
Figure 1. An oscilloscope display of the vertical, horizontal, and lateral components of the force exerted by the cat during the trot.
absolute impulse due to the vertical force during the stance phase of the hindlimb. In both the forelimb and the hindlimb, the peak vertical force increases as the speed of the cat increases, but the absolute impulse remains relatively constant over a wide range of trot speeds.
The horizontal force exhibits the following characteristics. There is a point cle[al,bl] such that Fy(t)<>0 for cl<>
762
- ARIEL AND R. MAULUCCI
the horizontal force is applied in the direction opposite to the locomotion. A comparison of these two subphases for the forelimb reveals that
Icl-alI>Ibl-cil, max({IFy(t)Ilal
max({IFy(t)Ilcllfb1Fy(t)dtl. 1 1
Thus, in the stance phase of the forelimb, the magnitudes of the duration, peak, and impulse of the horizontal force are respectively greater in the impact phase than in the propelling phase. Similarly, for the hindlimb, there is a point c3E[a3,b3] such that [a3,c3] is an impact phase and [c3,b3] is a propelling phase. However, for the hindlimb,
Ib3-c31max({IFy(t)IIa3`_tw<_c3}), and="" ifb3fy(t)dti="">Ifc3Fy(t)dtl.
3 3
Thus, in the stance phase of the hindlimb, the magnitudes of the duration, peak, and impulse of the horizontal force are respectively greater in the propelling phase than in the impact phase. In general, the impact phase tends to dominate the forelimb, whereas the propelling phase tends to dominate the hindlimb.
The lateral force, for all limbs, is chiefly applied in the direction away from the body of the cat.
In conclusion, it is felt that these kinetic parameters will provide new and meaningful insights into the behavior of the neural mechanisms of locomotion.